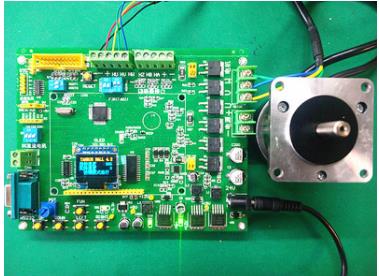
- 01 直流有刷電機(第1節(jié))_電機概述&硬石電機實驗箱
- 01 直流有刷電機(第2節(jié))_有刷電機原理和減速電機
- 01 直流有刷電機(第3節(jié))_電機參數(shù)和電機控制基礎(chǔ)
- 01 直流有刷電機(第4節(jié))_H橋驅(qū)動的不同模式分析
- 01 直流有刷電機(第5節(jié))_MOS管驅(qū)動原理分析(含自舉電路)
- 01 直流有刷電機(第6節(jié))_硬石有刷驅(qū)動板原理圖分析
- 01 直流有刷電機(第7節(jié))_有刷電機基本旋轉(zhuǎn)驅(qū)動代碼分析
- 01 直流有刷電機(第8節(jié))_有刷電機的按鍵和串口控制實現(xiàn)
- 01 直流有刷電機(第9節(jié))_有刷電機編碼器測速實現(xiàn)
- 02 PID算法實現(xiàn)閉環(huán)控制(第1節(jié))_閉環(huán)控制系統(tǒng)
- 02 PID算法實現(xiàn)閉環(huán)控制(第2節(jié))_PID控制的比例P和積分I的介紹
- 02 PID算法實現(xiàn)閉環(huán)控制(第3節(jié))_PID控制的微分項
- 02 PID算法實現(xiàn)閉環(huán)控制(第4節(jié))_位置式PID和增量式PID算法介紹
- 02 PID算法實現(xiàn)閉環(huán)控制(第5節(jié))_增量式PID速度閉環(huán)代碼分析1(PID上位機使用介紹)
- 02 PID算法實現(xiàn)閉環(huán)控制(第6節(jié))_增量式PID速度閉環(huán)代碼分析2
- 02 PID算法實現(xiàn)閉環(huán)控制(第7節(jié))_位置式PID速度環(huán)和位置環(huán)代碼分析
- 02 PID算法實現(xiàn)閉環(huán)控制(第8節(jié))_PID參數(shù)調(diào)試方法
- 02 PID算法實現(xiàn)閉環(huán)控制(第9節(jié))_電機電流采集原理和代碼分析
- 02 PID算法實現(xiàn)閉環(huán)控制(第10節(jié))_提高電流采集精度
- 02 PID算法實現(xiàn)閉環(huán)控制(第11節(jié))_限流保護功能
- 02 PID算法實現(xiàn)閉環(huán)控制(第12節(jié))_電流環(huán)
- 02 PID算法實現(xiàn)閉環(huán)控制(第13節(jié))_位置速度電流多閉環(huán)
- 03 舵機控制(第1節(jié))_舵機的內(nèi)部結(jié)構(gòu)和工作原理
- 03 舵機控制(第2節(jié))_舵機的控制信號和控制演示
- 04 步進電機驅(qū)動與控制(第1節(jié))_步進電機的幾個基本概念
- 04 步進電機驅(qū)動與控制(第2節(jié))_單相和兩相步進電機結(jié)構(gòu)和工作原理
- 04 步進電機驅(qū)動與控制(第3節(jié))_步進電機分類與結(jié)構(gòu)特點
- 04 步進電機驅(qū)動與控制(第4節(jié))_步進電機工作原理和細分驅(qū)動原理
- 04 步進電機驅(qū)動與控制(第5節(jié))_28步進電機驅(qū)動硬件設(shè)計分析
- 04 步進電機驅(qū)動與控制(第6節(jié))_28步進電機旋轉(zhuǎn)和控制
- 04 步進電機驅(qū)動與控制(第7節(jié))_57步進電機參數(shù)介紹
- 04 步進電機驅(qū)動與控制(第8節(jié))_57步進電機驅(qū)動芯片說明1
- 04 步進電機驅(qū)動與控制(第9節(jié))_57步進電機驅(qū)動芯片說明2
- 04 步進電機驅(qū)動與控制(第10節(jié))_57步進電機旋轉(zhuǎn)實現(xiàn)
- 04 步進電機驅(qū)動與控制(第11節(jié))_57步進電機旋轉(zhuǎn)控制
- 04 步進電機驅(qū)動與控制(第12節(jié))_4個步進電機和RS485的控制例程分析
- 05 步進電機梯形加減速(第1節(jié))_步進電機的失步和過沖
- 05 步進電機梯形加減速(第2節(jié))_梯形加減速算法原理分析
為改善步進電機堵轉(zhuǎn)、失步、超步等問題,提高步進精度,使步進電機能夠快速準(zhǔn)確定位,提出基于STM32F4微控制器的步進電機控制系統(tǒng)設(shè)計;通過改變PWM輸出定時器的預(yù)分頻值控制電機轉(zhuǎn)速,直線階梯形升降速算法實現(xiàn)調(diào)速;采用DMA方式控制電機脈沖數(shù)量,實現(xiàn)位置精確控制;實驗以及實際應(yīng)用情況表明,階梯形升降速算法以及DMA方式位置控制算法能夠滿足一般要求,系統(tǒng)誤差為士0.01度;系統(tǒng)精確度高、性能可靠、擴展性強,具有較高的應(yīng)用價值。